Human-object contact serves as a strong cue to understand how humans physically interact with objects. Nevertheless, it is not widely explored to utilize human-object contact information for the joint reconstruction of 3D human and object from a single image. In this work, we present a novel joint 3D human-object reconstruction method (CONTHO) that effectively exploits contact information between humans and objects. There are two core designs in our system: 1) 3D-guided contact estimation and 2) contact-based 3D human and object refinement. First, for accurate human-object contact estimation, CONTHO initially reconstructs 3D humans and objects and utilizes them as explicit 3D guidance for contact estimation. Second, to refine the initial reconstructions of 3D human and object, we propose a novel contact-based refinement Transformer that effectively aggregates human features and object features based on the estimated human-object contact. The proposed contact-based refinement prevents the learning of erroneous correlation between human and object, which enables accurate 3D reconstruction. As a result, our CONTHO achieves state-of-the-art performance in both human-object contact estimation and joint reconstruction of 3D human and object. The code is publicly available.
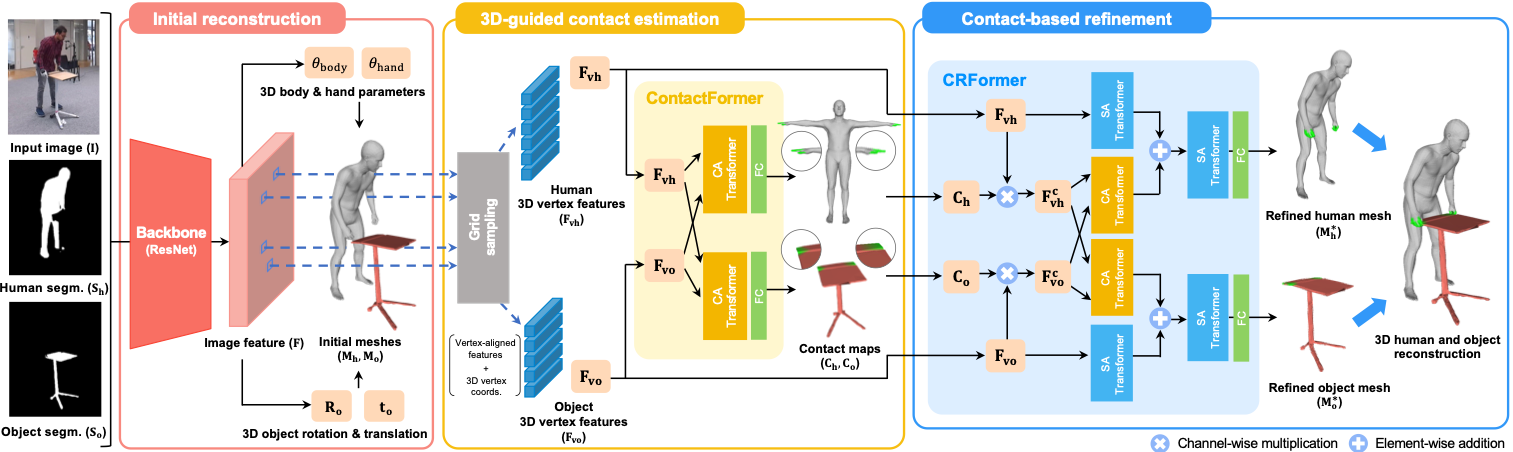
Our method first reconstructs 3D human and object meshes. Then, the initial meshes are utilized to construct 3D vertex features. Subsequently, ContactFormer estimates human-object contact maps from the 3D vertex features. Lastly, CRFormer aggregates the 3D vertex features based on the estimated contact maps to provide refined human and object meshes. The green color indicates the estimated contacting regions.
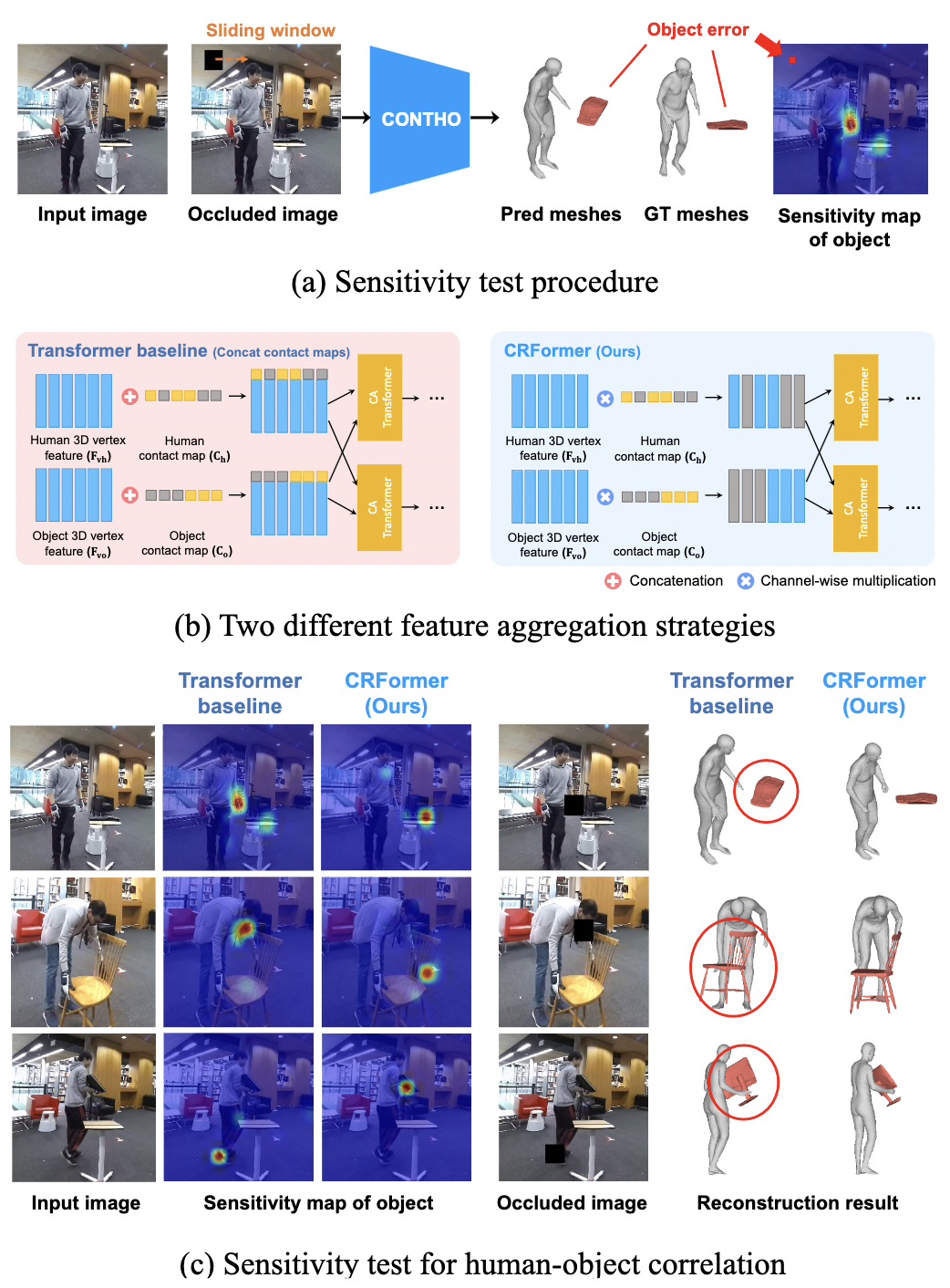
We conduct a sensitivity test, inspecting which region is sensitive in reconstruction, for Transformer baseline and our CRFormer. In the Transformer baseline, the object errors are sensitive to human regions not actually related to human-object interaction, as a result of undesired correlation. In our CRFormer, the object errors are mostly sensitive around regions containing human-object contact.
There's a lot of excellent works that we wish to share.
Hand4Whole: Accurate 3D Hand Pose Estimation for Whole-Body 3D Human Mesh Estimation.
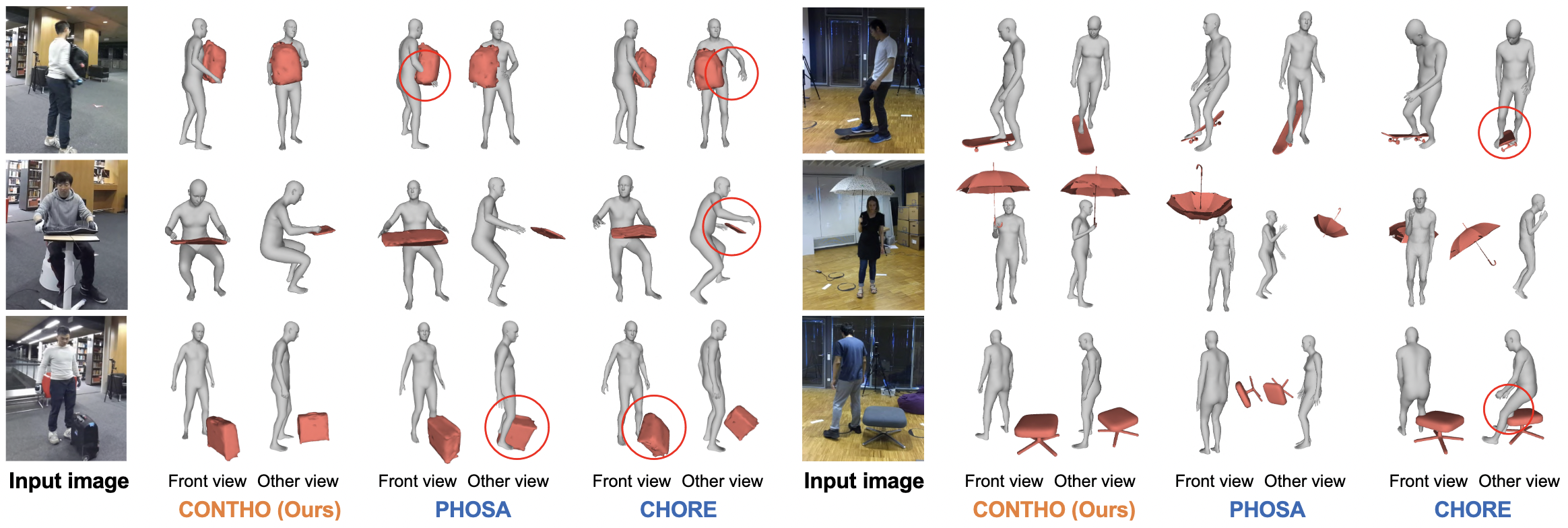
CHORE: Contact, Human and Object REconstruction from a single RGB image.
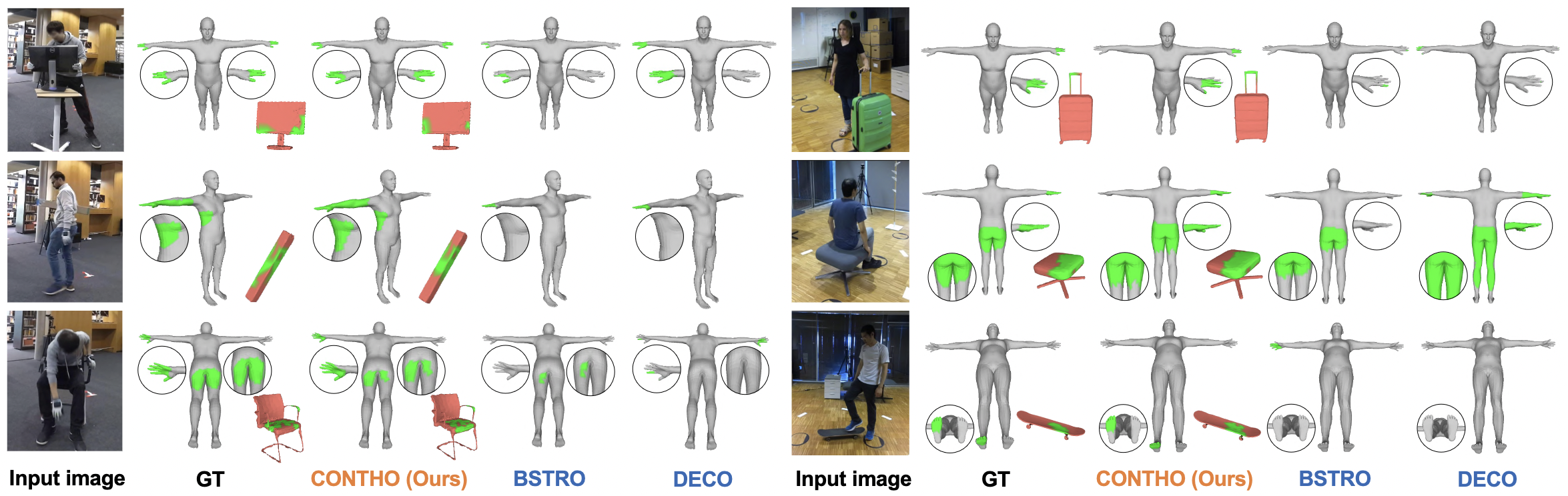
DECO: Dense Estimation of 3D Human-Scene Contact in the Wild.
@inproceedings{nam2024contho,
title = {Joint Reconstruction of 3D Human and Object via Contact-Based Refinement Transformer},
author = {Nam, Hyeongjin and Jung, Daniel Sungho and Moon, Gyeongsik and Lee, Kyoung Mu},
booktitle = {Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition},
year = {2024}
}